

Dc motor with Raspberrypi
Dc motor with Raspberrypi
In blog, we will interface the L298N H-bridge with raspeberry pi and run a script on the pi to move the robot. This will be divided into 2 sections.
- Hardware Integration
- Software Program and testing
Let’s go.
Hardware Integration First, let’s talk about L298N.
General diagram of driver ports
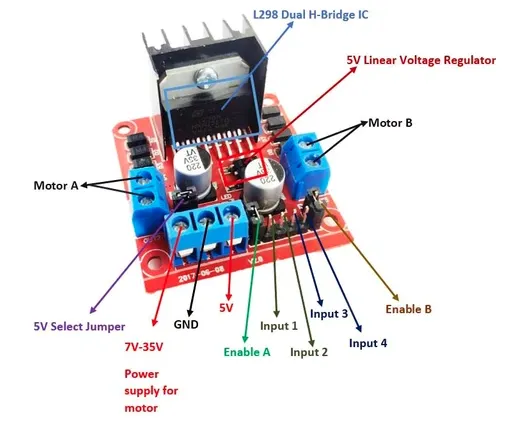
We have 4 6V DC motors, and we have only two motor outputs, therefore, 2 motors will use the same motor output from the H-bridge. Hence, 2 motors connect to Motor A output, the other 2 motors connect to the Motor B output.
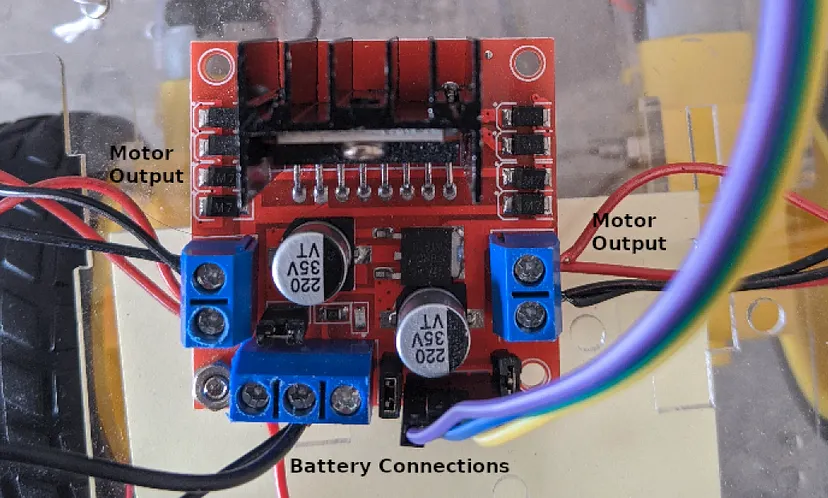
Before we connect the motor driver to the pi, let’s take care of the battery pack which would power the motors. The +ve of the batter pack gets connected to the power supply connection from the image and the -ve of the battery pack gets connected to the GND.
Connections
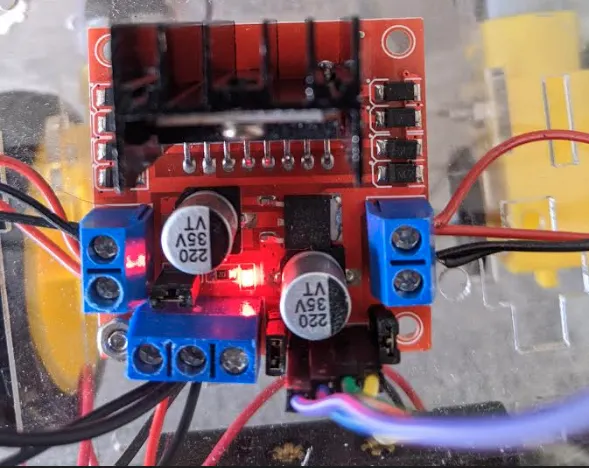
Once the battery pack (Power supply) is connected properly to the H-bridge, a red light will start glowing.
Now, let’s connect the H-bridge with raspberry pi. There can be many combinations for connecting L298N to pi. This is one of them:
Raspberry pi connection
| L298N — H bridge | Connects to: |
|---|---|
| IN1 | RPi GPIO 21 |
| IN2 | RPi GPIO 20 |
| IN3 | RPi GPIO 16 |
| IN4 | RPi GPIO 12 |
- Software Program and testing
Now that the hardware of H-Bridge has been interfaced with the Pi, let’s write a python program to run this hardware and see some action ;p.
import RPi.GPIO as gpio
import time
def init():
gpio.setmode(gpio.BCM)
gpio.setup(21, gpio.OUT)
gpio.setup(20, gpio.OUT)
gpio.setup(16, gpio.OUT)
gpio.setup(12, gpio.OUT)
def forward(sec):
init()
gpio.output(21, False)
gpio.output(20, True)
gpio.output(16, True)
gpio.output(12, False)
time.sleep(sec)
gpio.cleanup()
def reverse(sec):
init()
gpio.output(21, True)
gpio.output(20, False)
gpio.output(16, False)
gpio.output(12, True)
time.sleep(sec)
gpio.cleanup()
def left_turn(sec):
init()
gpio.output(21, True)
gpio.output(20, False)
gpio.output(16, True)
gpio.output(12, False)
time.sleep(sec)
gpio.cleanup()
def right_turn(sec):
init()
gpio.output(21, False)
gpio.output(20, True)
gpio.output(16, False)
gpio.output(12, True)
time.sleep(sec)
gpio.cleanup()
seconds = 1
time.sleep(seconds)
print("forward")
forward(seconds)
time.sleep(seconds-0.5)
print("right")
right_turn(seconds)
time.sleep(seconds-0.5)
time.sleep(seconds)Code is available at https://github.com/AbelBekele/RaspberryPi-home
Newsletter
If you liked this post, sign up to get updates in your email when I write something new! No spam ever.
Subscribe to the Newsletter